
OpenWrist
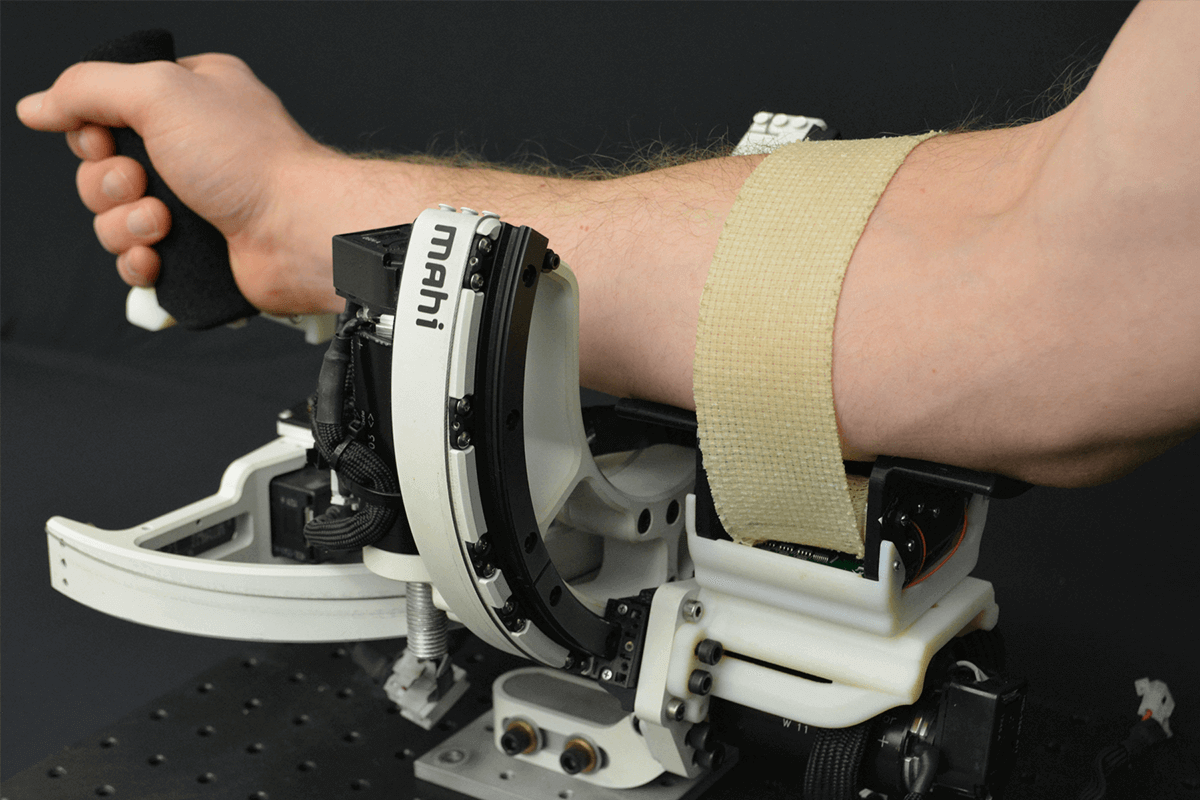
The OpenWrist is a 3 degree-of-freedom (DOF), purely rotational exoskeleton I designed for wrist rehabilitation and haptic applications. It is capable of rendering high fidelity haptic environments through the application of DC motors and backlash-free capstan-cable transmissions. If you’re interested in learning more details about the OpenWrist’s design or how it stacks up against other upper extremity exoskeletons, take a look at my Master’s Thesis or watch a video [1] [2].


E. Pezent, “Design, Characterization, and Validation of the OpenWrist Exoskeleton,” Department of Mechanical Engineering, Rice University, 2017 (Master’s Thesis).
OpenWrist + Maestro
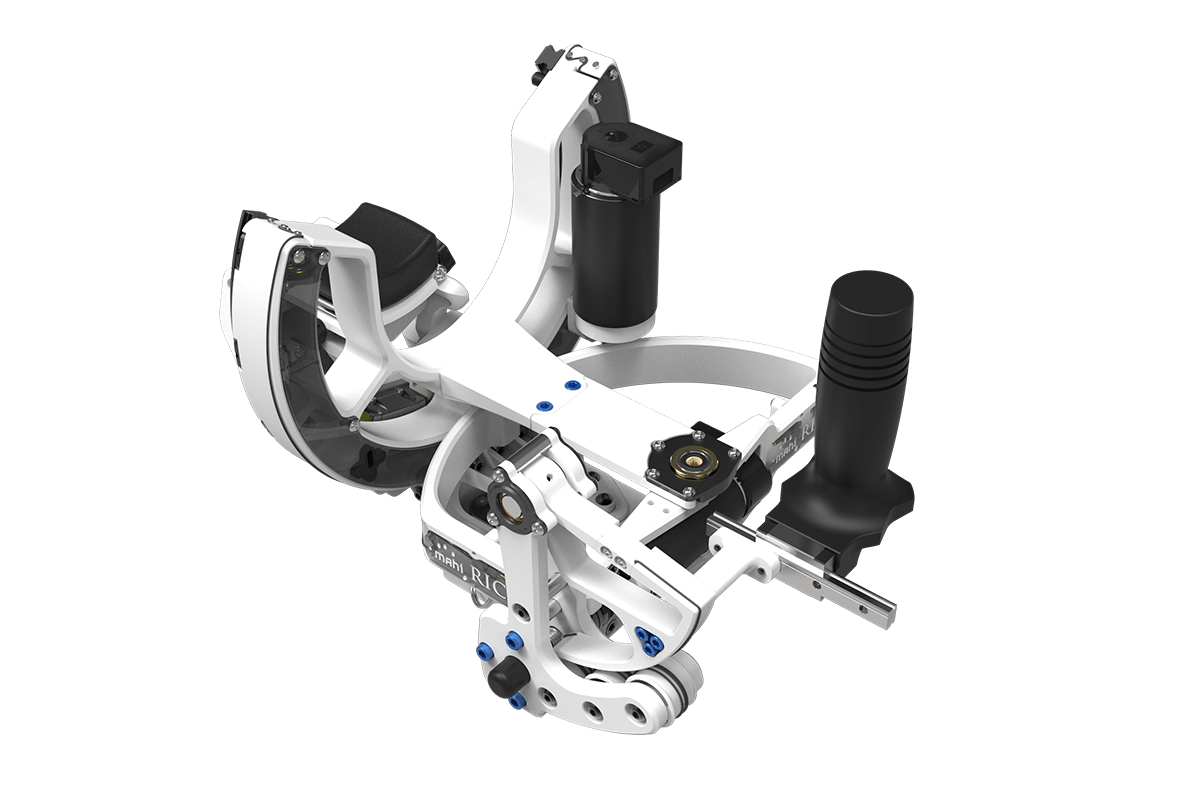
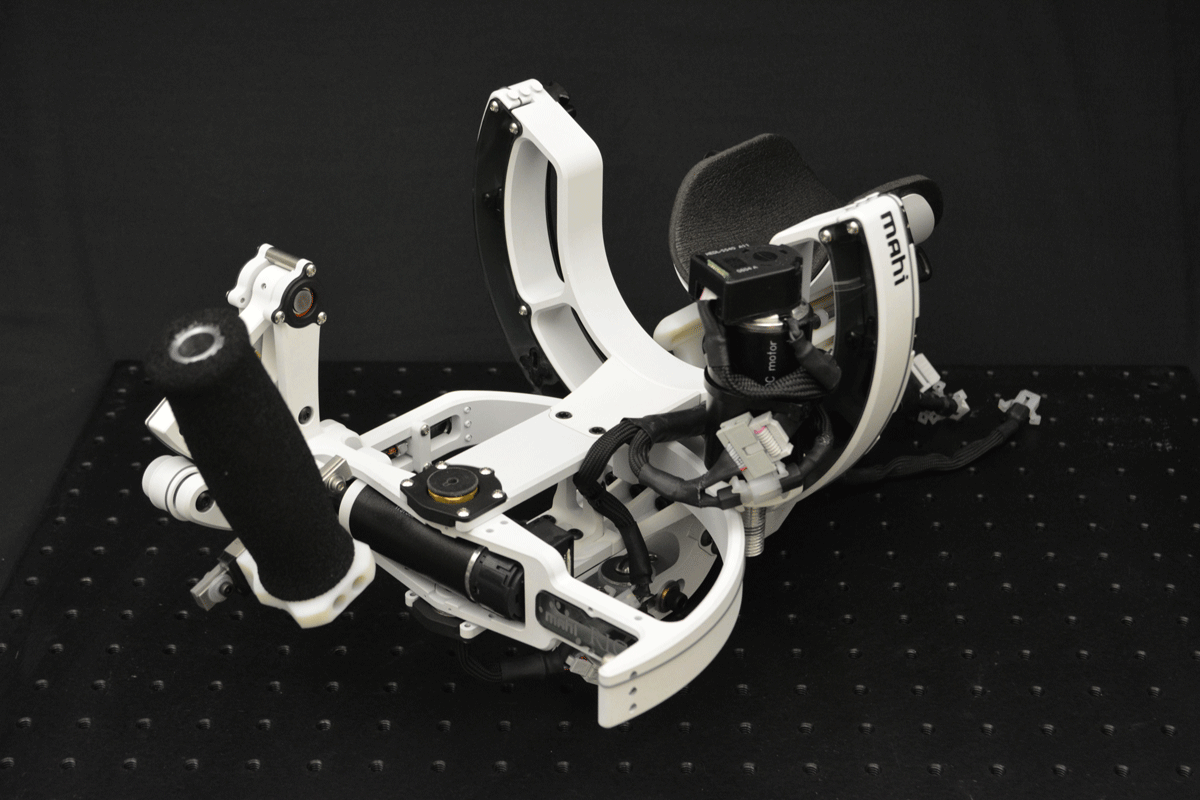
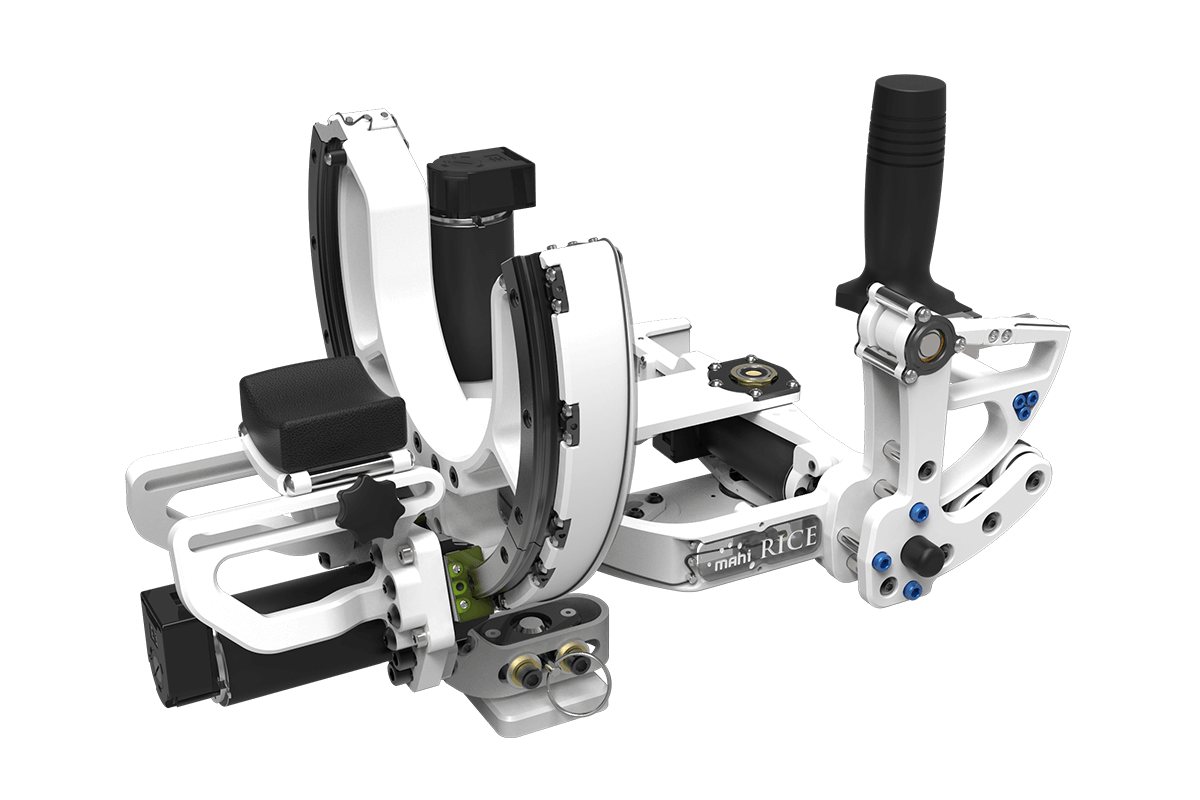
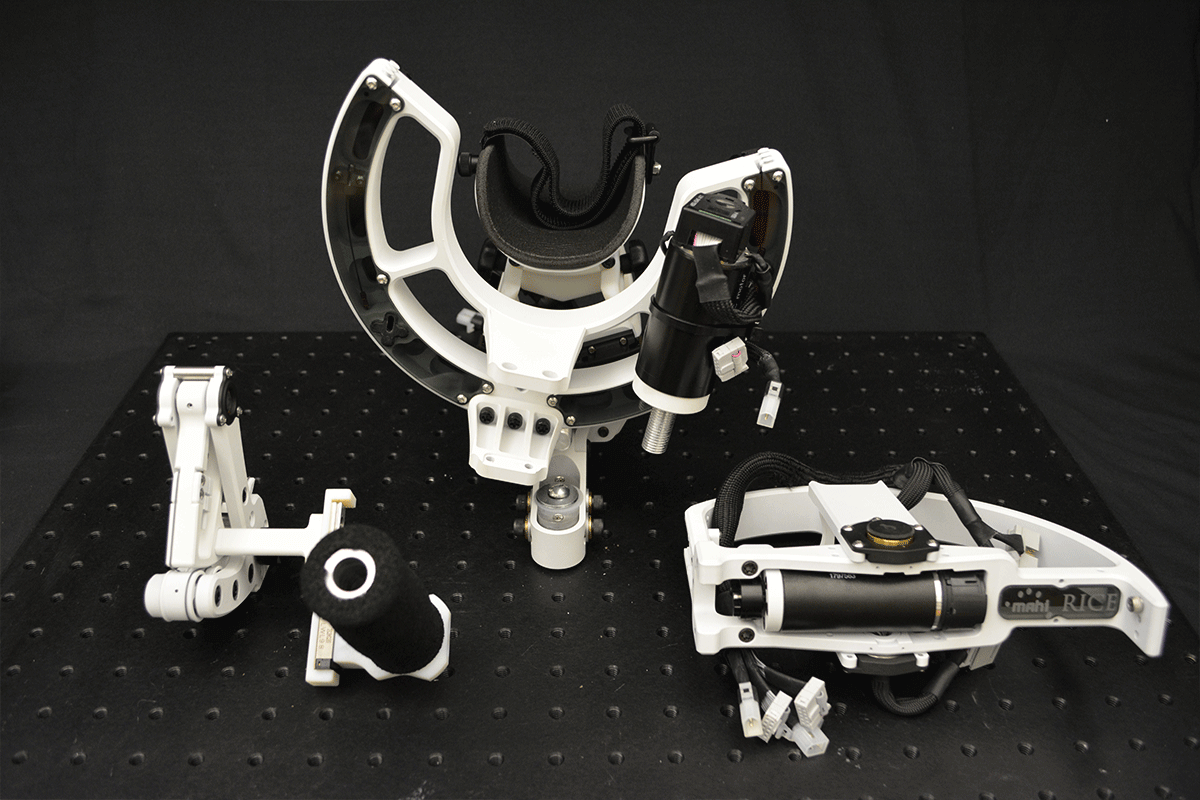
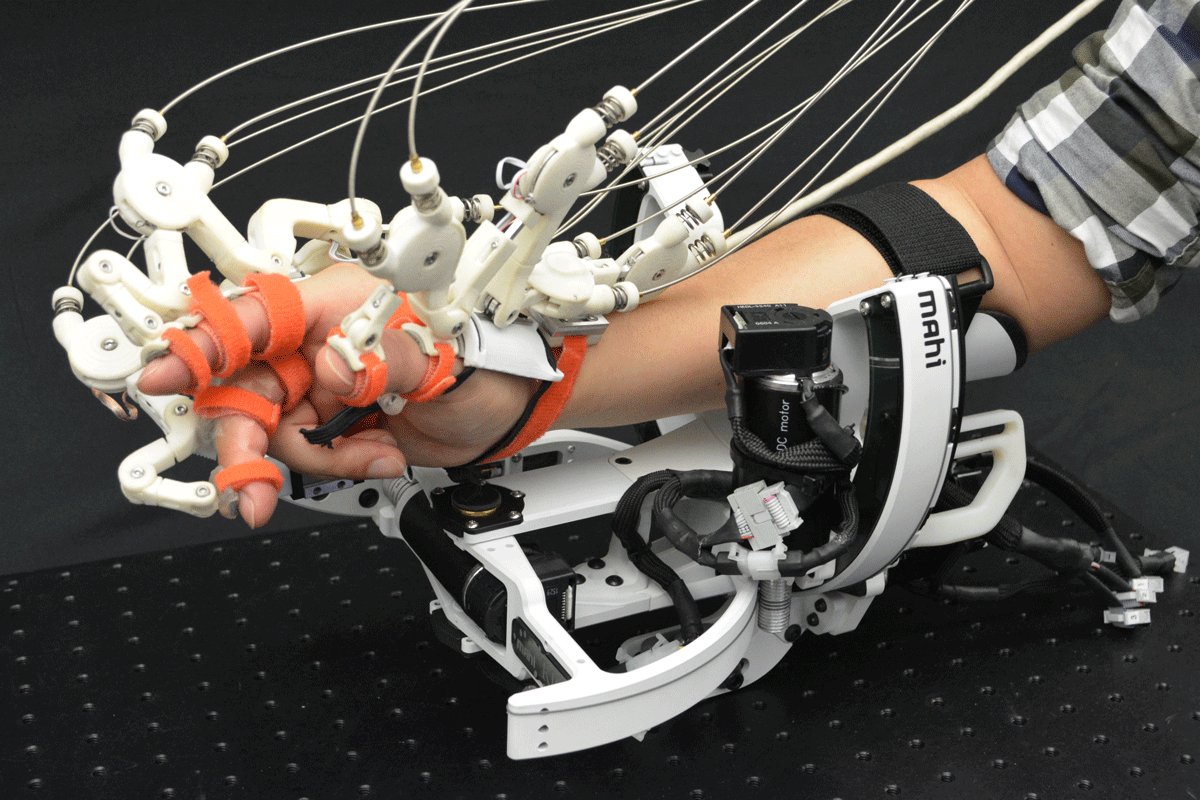
Often, robotic rehabilitation and associated research focuses on training simple, single DOF reaching or pointing tasks. However, it is hypothesized that a more effective and practical approach may be to train functional tasks and activities of daily living, such as picking up a cup, opening a letter, or throwing a ball. Perhaps one of the reasons this has not been explored sufficiently is that it requires highly dexterous, multi-DOF robots that do not commonly exist. The READAPT project, a collaboration between the MAHI Lab and the ReNeu Lab at the University of Texas at Austin, aims to fill this void by introducing one of the first fully articulated hand and wrist exoskeletons for robotic rehabilitation through the combination of the OpenWrist and Maestro hand exoskeleton.

E. Pezent, C. G. Rose, A. Deshpande, and M. K. O’Malley, “Design and Characterization of the OpenWrist: A Robotic Wrist Exoskeleton for Coordinated Hand-Wrist Rehabilitation,” IEEE International Conference on Rehabilitation Robotics (ICORR), 2017.
OpenWrist + CUFF
In addition to kinesthetic haptic devices like the OpenWrist and ReADAPT, I have also worked with cutaneous, skin-stretching haptic devices. These devices offer a unique advantage because they can deliver haptic cues in a small, lightweight, and often wearable package. Collaborating with researchers from the University of Pisa, we successfully integrated the CUFF skin-stretch device and OpenWrist, and are actively exploring ways to marry both kinesthetic and cutaneous haptic feedback in user intuitive ways. Check out these videos from World Haptics Conference 2017, Haptics Symposium 2018, and Haptics Symposium 2020.

E. Pezent, S. Fani, J. Clark, M. Bianchi, and M. K. O’Malley, “Spatially Separating Haptic Guidance From Task Dynamics Through Wearable Devices,”, IEEE Transactions on Haptics, 2019.
C. Smith, E. Pezent, and M. K. O’Malley, “Spatially Separated Cutaneous Haptic Guidance for Training of a Virtual Sensorimotor Task,” IEEE Haptics Symposium, 2020.